
Человеческие ощущения включают в себя общеизвестные и менее узнаваемые чувства, такие как жажда, голод и равновесие. Стимулы, обнаруживаемые сенсорными рецепторами, кодируются в электрические сигналы, которые движутся по нервным путям к определенным частям мозга, чтобы быть декодированными в полезную информацию. Весь процесс сложен. Например, осязание — это совокупность нескольких ощущений, охватывающих давление, боль и температуру, а сенсорные рецепторы стимулируются сочетанием механической, химической и тепловой энергии. До сих пор было непросто включить ощущения прикосновения в виртуальную и дополненную реальность. Но группа китайских и американских ученых разработала интегрированную в искусственную кожу технологию, которая применяет давление, вибрацию или движение к пользователю, позволяющую ощущать прикосновения — как переданные другим пользователем, так и сгенерированные компьютером.
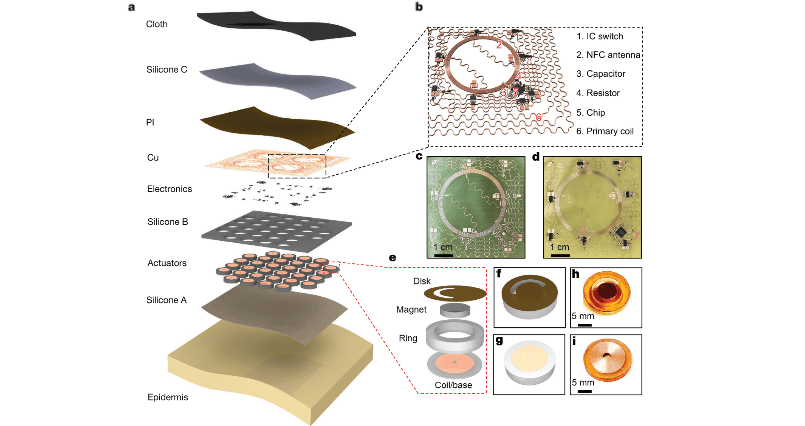
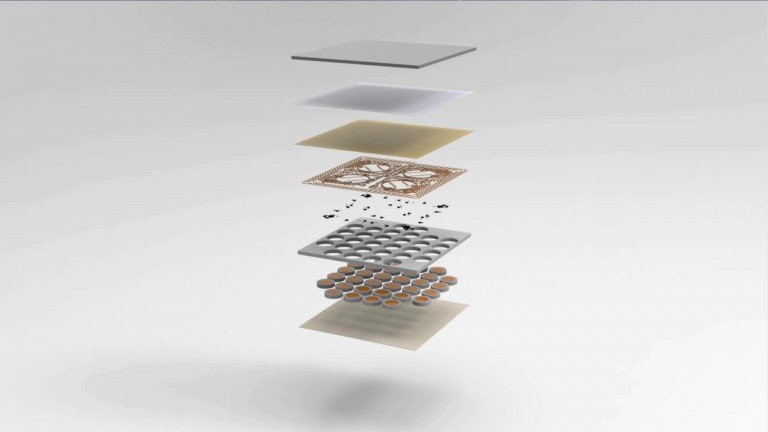
Технология авторов состоит из мягкого, легкого листа электроники, который прилипает к коже и соответствует форме тела удобным и неинвазивным образом. Лист содержит массивы виброприводов — механических компонентов, которые преобразуют электрическую энергию в вибрации. Каждый привод состоит из двух соединенных частей: катушки из медной проволоки, закрытой на акриловой основе, и постоянного магнита, закрепленного на полимерной балке. Когда электрический ток проходит через катушку, магнит вибрирует с той же частотой, что и ток.

Каждый привод имеет массу всего 1,4 грамма и имеет размеры 12–18 мм в диаметре и 2,5 мм в толщину. Принимая во внимание, что кожа человека может обнаруживать узлы касания субмиллиметрового масштаба, можно задаться вопросом, возможно ли уменьшить размеры исполнительных механизмов. Авторы предложили метод достижения такой миниатюризации и протестировали его, запустив моделирование. Они обнаружили, что диаметр и толщина каждого привода в будущем могут быть уменьшены в десять и три раза соответственно.
Ключевой особенностью устройства является то, что его исполнительные механизмы питаются и управляются по беспроводной сети. Поэтому он менее громоздок, чем носимые платформы, которые требуют соединительных проводов или внутренних батарей. Система использует первичную антенну для передачи энергии, несколько других антенн для управления исполнительными механизмами и управления ими, а также промежуточную антенну для повышения мощности, собираемой с первичной антенны. Установлено, что включение промежуточной антенны увеличивает собранную мощность примерно в три раза. Авторы провели моделирование, чтобы подтвердить, что их устройство соответствует рекомендациям Федеральной комиссии по связи США и Федеральной администрации по лекарственным средствам в отношении безопасных уровней радиационного воздействия и поглощения тканей.
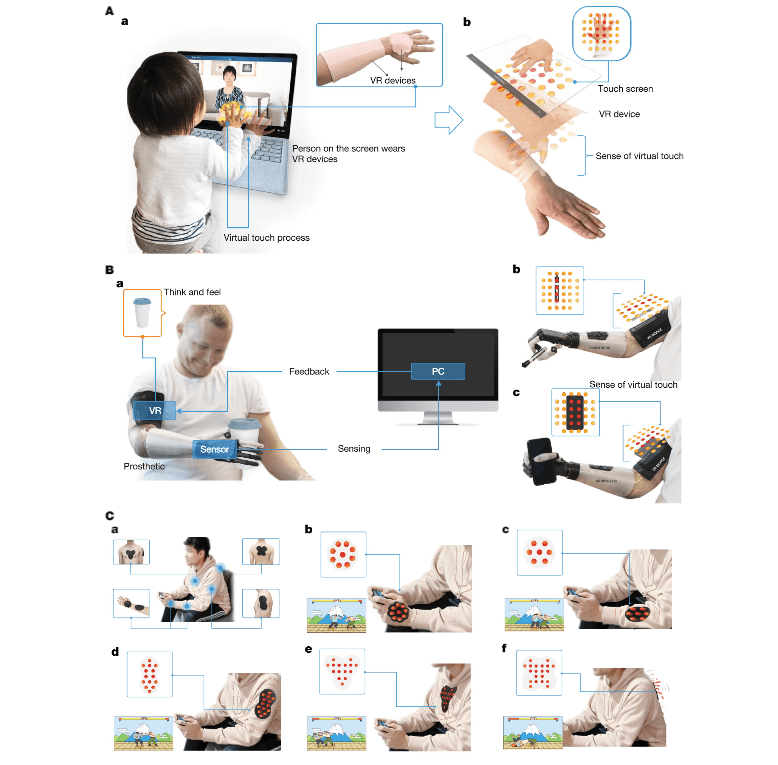
Расстояние между источником питания и платформой должно составлять менее одного метра, что делает технологию пригодной для определенных приложений в виртуальной и дополненной реальности. Разработчики описывают три конкретных примера. В первом случае девушка касается экрана, на котором отображается видеопоток бабушки; бабушка чувствует прикосновение через устройства на ее руке. Во втором примере человек, у которого ампутация предплечья и кисти, захватывает объект, используя протезную руку; устройство на его плече создает ощущение , которое воспроизводит форму объекта. В третьем примере человек, играющий в видеоигру, носит несколько устройств по всему телу; устройства активируются, когда происходит удар по соответствующей части тела игрового персонажа.
Эта технология имеет некоторые недостатки. Например, каждый исполнительный механизм приводится в действие заданным током около 5 миллиампер, что является относительно высоким значением по сравнению с тем, которое встречается в другой бытовой электронике. Кроме того, энергия, теряемая другими компонентами в виде тепла, может повлиять на рабочие характеристики привода и вызвать нагрев кожи, если рассеивание тепла не управляется должным образом. Более того, хотя оптимизированный привод требует только 1,75 милливатта мощности, общее энергопотребление технологии по-прежнему является ключевым ограничивающим фактором в устойчивой и беспроводной работе платформы для практического использования. Как указывают авторы, миниатюризация исполнительных механизмов могла бы стать реальным способом решения этих проблем.







